مع الزيادة المستمرة في الوحدات كبيرة الحجم والتوسع المستمر في السعة، وحتى ظهور وحدات متعددة بقدرة 10 ملايين ميجاوات قيد الإنشاء ومبنية بالفعل، فإن أهمية TSI تزداد أهمية. نظام الوحدات كبيرة السعة معقد، ونطاق المراقبة واسع، والمشاريع عديدة. يجب استبدال تشغيل ومراقبة المشغلين بنظام مراقبة سلامة موثوق به لتقليل احتمالية سوء التشغيل. في الوقت نفسه، بالنسبة للآلات الدقيقة الدوارة عالية السرعة مثل التوربينات البخارية، فإن أي أخطاء ستدفع ثمنًا باهظًا. يمكن لنظام مراقبة مؤهل وموثوق به تجنب سوء التشغيل والحوادث وضمان سلامة ممتلكات المحرك الرئيسي الكبير مثل التوربينات البخارية. نظام TSI الذي نتحدث عنه اليوم على وشك الظهور.
جهاز مراقبة التوربينات (TSI) هو نظام مراقبة توربينات بخارية. وهو جهاز مراقبة متعدد القنوات موثوق، يقيس باستمرار معلمات التشغيل الميكانيكية لدوار وأسطوانة مجموعة التوربينات البخارية والمولدات، ويعرض حالة تشغيل الآلة، ويرسل إشارات خرج إلى جهاز الإشارة، ويصدر إنذارًا أو حتى يوقف التوربين البخاري تلقائيًا عند تجاوز حد التشغيل المحدد. بالإضافة إلى ذلك، يوفر TSI أيضًا إشارات قياس لتشخيص الأعطال، ويتعاون مع أنظمة أخرى لتحليلها. (تستخدم هذه المقالة توربين البخار المكثف فوق الحرج، ثنائي الأسطوانات، ثنائي الصف، والمبرد بالهواء، بقدرة 600 ميجاوات، كمثال).
وفقًا للموضع النسبي لجسم الكشف، يمكن تقسيم الاهتزاز إلى ثلاثة أنواع: الاهتزاز المطلق للعمود، والاهتزاز المطلق لمقعد المحمل، والاهتزاز النسبي للعمود ومقعد المحمل. وفقًا لمبدأ الاهتزاز، يمكن الحصول على مسار المحور عن طريق تجميع الاهتزاز في اتجاهي X وY. لا يوجد اتصال داخلي ضروري بين الاتجاهين الرأسي والأفقي للعمود، أي أن الاهتزاز في الاتجاه الرأسي (اتجاه Y) كبير جدًا بالفعل، بينما قد يكون الاهتزاز في الاتجاه الأفقي (اتجاه X) طبيعيًا. لذلك، يتم تثبيت مسبار في كل اتجاه رأسي وأفقي. نظرًا لتأثير المستوى المركزي الأفقي على التركيب، في الواقع، يمكن تثبيت المسبارين بشكل عمودي على بعضهما البعض. عندما تتغير الفجوة بين طرف المستشعر وسطح العمود الدوار، يُخرج المستشعر إشارة تيار متردد إلى اللوحة، وتحسب اللوحة قيمة تغير الفجوة (أي الاهتزاز) من الذروة إلى الذروة (PP).
في قياس اهتزاز العمود، وُضِح أن اهتزاز العمود الكبير يمكن أن ينتقل إلى غلاف المحمل. يُستخدم مستشعر السرعة لقياس سرعة حركة الغلاف بالنسبة للمساحة الحرة. تكتشف اللوحة إشارة السرعة من المستشعر وتدمجها، ثم تُحوِّلها إلى قيمة إزاحة، وتحسب موضع الذروة المقابل.

مخطط تخطيطي لتركيب الاهتزازات
3.2، الإزاحة المحورية

مخطط تركيب الإزاحة المحورية

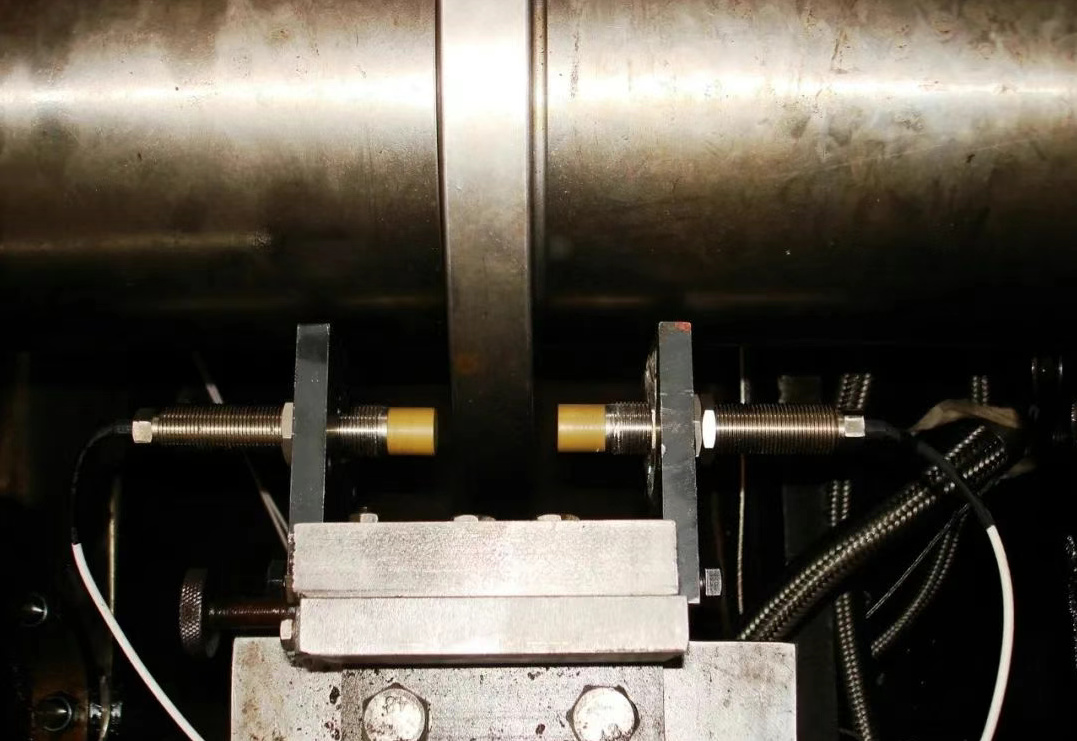
مخطط تركيب التمدد التفاضلي منخفض الضغط
يُطلق على تمدد الأسطوانة أيضًا اسم التمدد المطلق. ولمنع التشويش أو حوادث الاحتكاك الديناميكي والساكن الناتجة عن التسخين غير المتساوي للأسطوانة، يجب مراقبة تمددها لضمان سلامة الوحدة.

الانحراف هو انحناء العمود، أي موضعه الشعاعي. في حالة التشغيل العادي دون أحمال داخلية وخارجية على العمود، يظل العمود في موضعه التصميمي تحت تأثير تخميد ضغط الزيت. ومع ذلك، بمجرد تعرض الآلة لحمل مسبق خارجي أو داخلي معين، يصبح محور المحمل لامركزيًا، ويُمثل حجمه بقيمة الانحراف من الذروة إلى الذروة، أي الفرق بين القيم القصوى للاتجاهين الموجب والسالب لانحناء العمود.
جهاز طور المفتاح هو فتح فتحة مفتاح على العمود (أو إضافة مفتاح مرتفع)، ثم استخدام مسبار اهتزاز عادي لمحاذاة المفتاح. عندما يرصد المسبار المفتاح، يُخرج المُضخّم المسبق إشارة نبضية، وتكون الفترة بين إشارتي النبض دورة واحدة. كما يمكن استخدام إشارة طور المفتاح للإشارة إلى طور الاهتزاز. عند معرفة الزاوية بين مسبار الاهتزاز ومسبار طور المفتاح، يُمكن تحديد موضع الكتلة غير المتوازنة، أي موضع أعلى نقطة في الدوار. هذا مهم جدًا لتوازن العمود.

عندما يدور التوربين بسرعة عالية، إذا اختل توازن عزم الدوران وعزم رد الفعل، تتغير السرعة. عندما تخرج السرعة عن السيطرة، يحدث تلف في الأجزاء بسبب السرعة الزائدة، وفي الحالات الشديدة، قد يقع حادثٌ مروعٌ كـ"سيارة طائرة".
لضمان السلامة، يجب مراقبة سرعة التوربين بدقة. عند وصول السرعة إلى القيمة المحددة، يُصدر إنذار وتُتخذ إجراءات وقائية.
عند وصول السرعة إلى الصفر أثناء إيقاف التشغيل، تأكد من تشغيل الترس في الوقت المناسب. عند دوران الآلة، يمر الجزء العلوي والسفلي من سنّ لوحة الترس عبر المجس، وسيُغيّر المجس إشارة الخرج بشكل دوري، أي إشارة النبضة. تستقبل اللوحة إشارة النبضة هذه للعد والعرض، وبعد مقارنتها بالقيمة المُحددة، تُشغّل خرج تلامس المُرحّل. نطاق قياس السرعة: 0~5000 دورة في الدقيقة؛ قيمة ضبط السرعة الصفرية أقل من دورة واحدة في الدقيقة.



مستشعر السرعة مناسب لقياس سرعة الاهتزاز وإزاحة الاهتزاز (بعد التكامل) لمقاعد المحمل والإسكان وما إلى ذلك.
مبدأ العمل هو كما يلي: يتم تثبيت مغناطيس دائم على غلاف المستشعر بشكل صارم على الجسم المراد قياسه، ويحيط ملف كتلة بالقصور الذاتي بالمغناطيس ويتصل بالغلاف بواسطة زنبرك. أثناء القياس، عندما يهتز الجسم المراد قياسه، يتحرك المغناطيس، مما يتسبب في توليد حركة في المجال المغناطيسي. يتمتع الملف بكتلة قصور ذاتي كبيرة لأنه مثبت على الزنبرك، أي أنه ثابت نسبيًا مقارنة بجسم ذي اهتزاز عالي التردد. وبهذه الطريقة، يتحرك الملف خطيًا في المجال المغناطيسي، مما يولد قوة دافعة كهربائية مستحثة، يتناسب مقدارها مع السرعة الخطية لحركة الملف (أي سرعة الغلاف). من خلال الكشف عن القوة الدافعة الكهربائية المستحثة، يمكن الحصول على السرعة الخطية للجسم المراد قياسه.
|
مشروع الرصد
|
فئة المستشعر
|
مستشعر + مكبر صوت مسبق
|
كمية تركيب النموذج
|
|
اهتزاز العمود
|
مستشعر التيار الدوامي
|
TQ412 + IQS452 | 14 |
|
الإزاحة المحورية
|
مستشعر التيار الدوامي
|
تي كيو 402 +IQS452 | 4 |
|
اهتزاز المحمل (1 واط)
|
مستشعر التسارع
|
سي ايه 202 + اي بي سي 704 | 1 |
|
اهتزاز المحمل (2-7 واط)
|
مستشعر التسارع
|
CE680 | 6 |
|
الانحراف
|
مستشعر التيار الدوامي
|
TQ402+IQS452 | 1 |
|
المرحلة الرئيسية
|
مستشعر التيار الدوامي
|
TQ402+IQS452 | 1 |
|
سرعة
|
مستشعر المقاومة المغناطيسية
|
بي إي إف 1210 | 5 |
|
سرعة صفر
|
مستشعر التيار الدوامي
|
TQ402+IQS452 | 1 |
|
توسع تفاضلي عالي الضغط
|
مستشعر التيار الدوامي
|
تي كيو 403 + آي كيو إس 453 | 2 |
|
توسيع الأسطوانة
|
مستشعر التيار الدوامي
|
AE119 | 1 |
|
اسم الوحدة
|
نموذج الوحدة
|
عدد الوحدات
|
|
وحدة المعالجة المركزية
|
وحدة المعالجة المركزية م | 1 |
|
وحدة الاتصالات
|
MPC 4 + IOC4T | 9 |
|
وحدة الطاقة
|
بي ار اس 6 يو | 2 |
|
وحدة التتابع
|
رلك 16 | 1 |
 4.2.1، نظرة عامة على بطاقات نظام VM600
4.2.1، نظرة عامة على بطاقات نظام VM600


4.2.3، مخطط طوبولوجيا VM600

الكلمات :
عنوان : Unit 1904, No.96-2 Lujiang Road, Siming District, Xiamen
Phone/WhatsApp/Skype : +86 18060982349
بريد إلكتروني : sales6@nseauto.com










